A New Way to Explore Flooded Mines Using Muon Imaging and Underwater Robots
Exploring flooded mines is extremely difficult. Traditional tools like seismic scans, electrical testing, and ground-penetrating radar often don’t work well underwater. Sending people or machines into these environments is risky expensive, and limited. Because of this, it’s hard to study the structure of these mines, find remaining minerals, or figure out how to reuse them.
Mine.io offers a new solution. It combines a special type of imaging using particles called muons with smart underwater robots. This makes it possible to safely and effectively explore underwater parts of mines.
What Is Muon Imaging?
Muon imaging uses naturally occurring particles from space called muons. These particles pass through rock and other materials. By tracking how they move and where they’re absorbed, we can create 2D and 3D maps that show what’s inside the ground in terms of density, like empty spaces, mineral deposits, or cracks. This method works well underwater and doesn’t need much equipment. It’s also more accurate and less invasive than older methods.
How It All Works Together


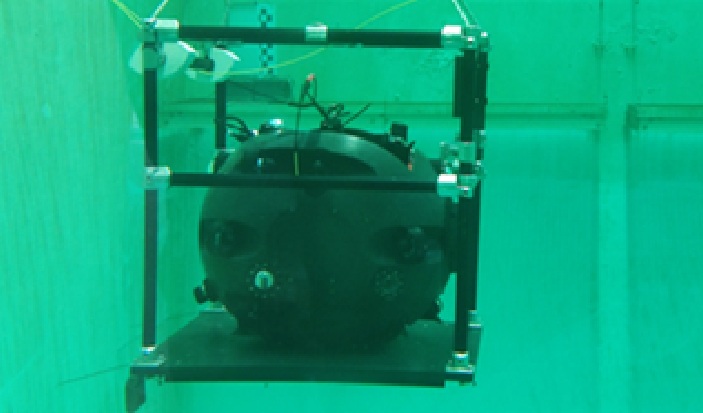
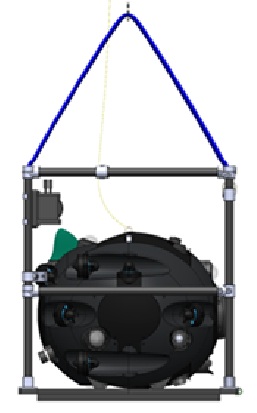
The project uses specially designed muon detectors created by research groups Wigner RCP (Figures 1,2). These detectors are carried through the mine by an autonomous underwater vehicle (AUV) called EVA, built by INESC-TEC (Figures 3,4). The underwater environment is due explored previously by another AUD, the UX1 Neo(Figures 5,6). These smart robots can move through the mine on their own and place the detectors where they’ll work best.


Testing and What’s Next
First round of real-world tests have been happening all through 2025 at a flooded open-pit mine in Portugal (Fig. 7). If this pilot is successful, the system will just improve by collecting real data and moving towards automation, giving scientists real-time information about what’s underground.

Why This Matters
Mine.io fits modern technology into mining to make more efficient, safe and sustainable the way we source raw materials. This solution is described in more detail in the blog article ‘Sustainable Exploration, a New Paradigm – summary session’.
Final Remarks
Mine.io is changing the way we explore in remote and or difficult to reach location with remaining economical value such as flooded mines. By combining muon imaging with smart robots, it offers a safe, efficient, and precise way to understand these hidden places.
After testing the system in a real mine, collection of data will just improve future prototypes and enhance its approach and potential reach will just be expanded.
WP3 – Eco-efficient technological solutions for exploration, electrification and extraction
T3.1 Muon imaging and monitoring instrumentation for mining applications and for in-situ underwater exploration (Leader: WRCP, Contributor: MUO, INE])
T3.2 Underwater vehicle for in situ exploration in flooded mines, and UAV-derived 3D imaging (Leader: INE, Contributor: ACC, MUO, UGR, USAL)
Stay tuned, more articles from the Progress Work Campaign series will be coming soon…