Pilots
Pilot site 1.1: Germany
Location: Research and Education Mine “Reiche Zeche” – Freiberg, Germany
Involved partners: TUB (lead), ICCS, LTU

Two Pilot Sites are situated at TU BAF: One is Reiche Zeche a former silver mine which is now used as research and education mine. The mine offers the proper infrastructure for the whole spectrum of underground mining research: extraction of ore (Biohydrometallurgy), ventilation, geophysical testing etc. The currently assigned mine field is approximately 12-14 km of mine workings. The main tasks here are:
– Deployment of Mine.io digital infrastructure and Edge systems in our research and educational mine Reiche Zeche
– Test bed for real time digital monitoring and cloud-based process control of the drilling rig and mine ventilation system
– Implementing a digital twin of the mine ventilation system
Pilot site 1.2: Germany
Location: Digital TSL-Smelter at the Institute of Nonferrous Metallurgy – Freiberg, Germany
Involved partners: TUB (lead), LTU, subcontractors (mecorad GmbH and Bundesanstalt für Materialforschung und -prüfung)
The second Pilot Site situated at TU BAF in Freiberg is a Top Submerged Lance (TSL) smelter which is common in the non-ferrous metallurgical industry. As part of the project, this key processing plant will be digitized by combining the existing infrastructure with novel sensors to create a new measurement-driven generation of digital twins. The aim is to demonstrate a beyond state-of-the-art sensor-based digitization technology for smelting at TRL6.
An advanced digital twin system will be developed using the plant ACT platform, incorporating advanced measurements and online process models using HSC-Sim software. To further enhance the capabilities of the digital twin system, advanced sensors will be integrated into the platform. These sensors will enable deeper analysis of fluid dynamics through acoustic measurements. Radar and LIBS measurements provide valuable insights into slag properties. The inclusion of off-gas measurements using FTIR methodology will allow for comprehensive assessment of process emissions. Additionally, monitoring the temperature and bath partial pressure of oxygen will facilitate optimal impurity removal and valuable metal recovery.
Location: Ore Processing Plants, KGHM Polska Miedź S.A. – Polkowice, Poland
Involved partners: KGHM (lead) Ł-ITR, Ł-EMAG, AGH, LTU

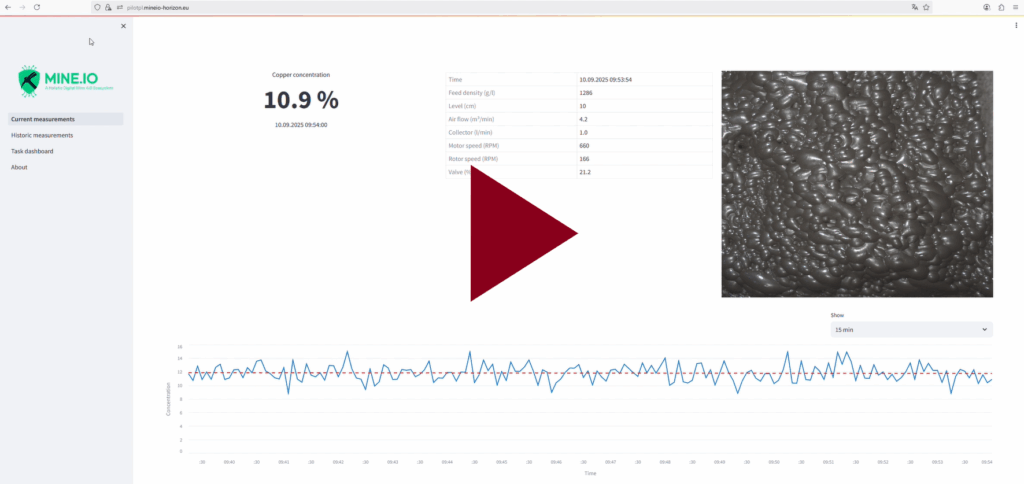
Demo of the PIT system interface
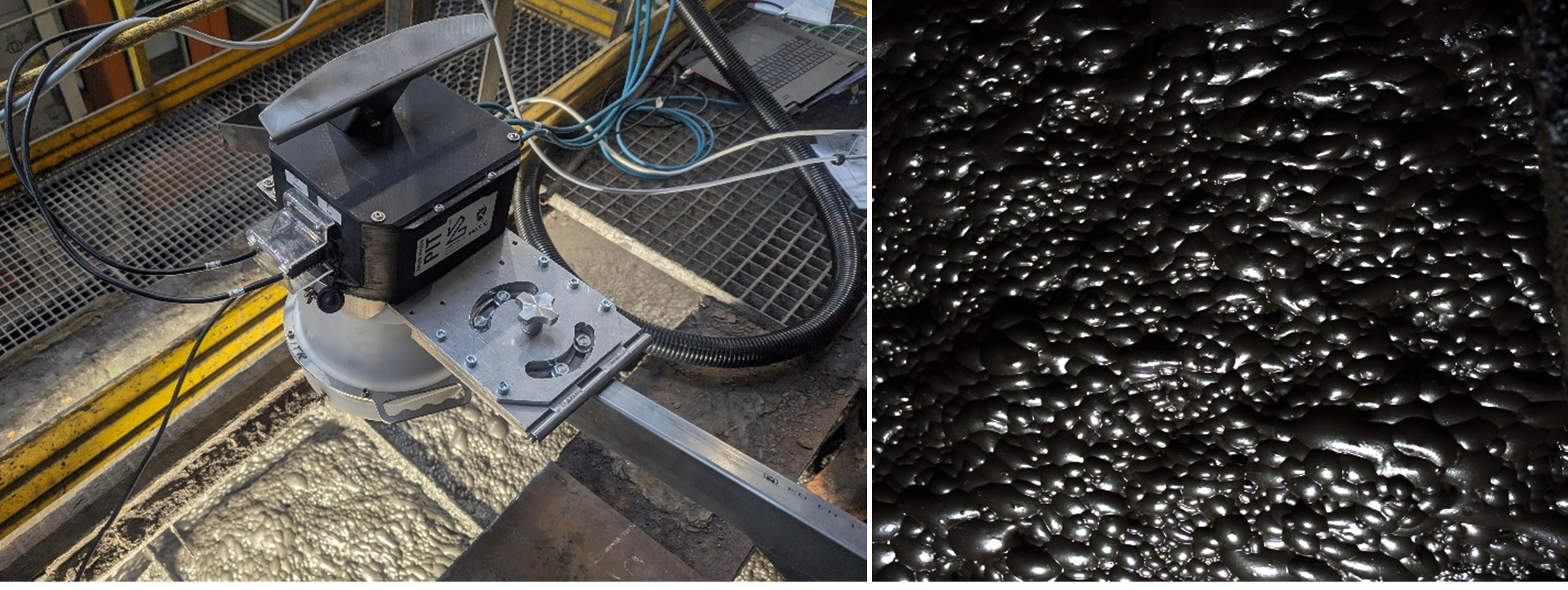
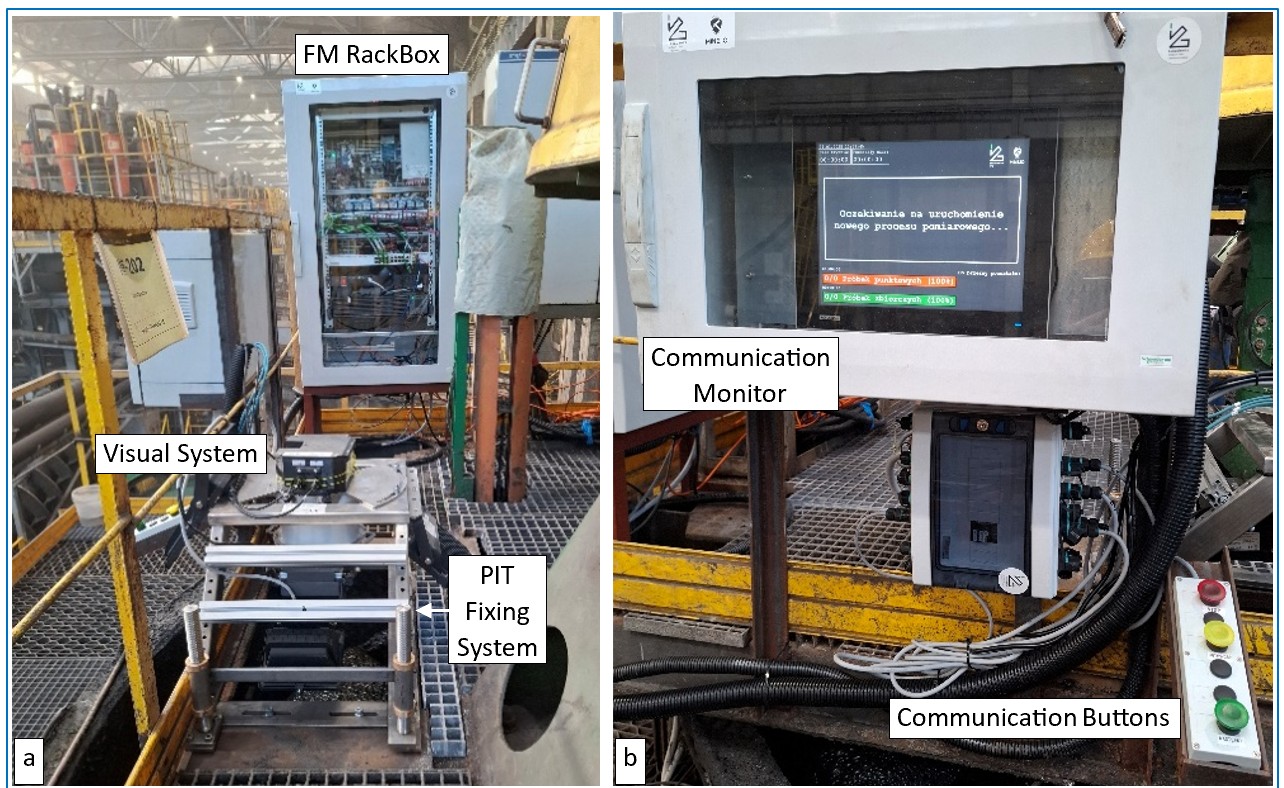
A few photos from the work on the pilot facility
Read about technical solutions
The main objective of this pilot project is to install and test the PIT System at KGHM Polska Miedź S.A., within selected flotation cells. The effectiveness of the system will be experimentally verified in the industrial environment of the flotation process. Throughout the pilot tests, a substantial dataset of froth images and froth samples will be collected for chemical and XRF analysis.
The collected data will enable the optimization of machine learning (ML) and artificial intelligence (AI) algorithms for accurately estimating the metal content based on froth image patterns. Additionally, the development and testing of AI algorithms and associated software for monitoring the flotation process will be conducted.
The resulting algorithms, modules, methods, processes, and procedures will be integrated within the components of the AI analytical system. This integration will enhance the overall monitoring capabilities of the system, improving its efficiency and effectiveness in overseeing the flotation process.


Pilot site 3.1: Greece
Location: Lavrion Ancient Silver Mines, Attica Region, Greece
Involved partners: AMDC (lead), ACC, HMU, USAL

The goal of this pilot project is to showcase a cutting-edge sensor-based digitization technology for on-site exploration and waste identification. This technology will be demonstrated at the TRL6 level, surpassing the current state-of-the-art. Additionally, a Risk Assessment methodology and an Environmental & Social Impact Assessment (ESIA) approach to guide us in selecting the most suitable remediation and metal extraction methods or technologies will be implemented.
As part of the project, we will not only focus on demonstrating the selected remediation methods or technologies but also investigate the possibility of coordinating these measures with the extraction and utilization of the waste material that is being removed. By doing so, it aims to maximize the benefits and minimize the environmental impact of the overall process.
Furthermore, the assessment of environmental and social impacts during the post-mining era will be prioritized, ensuring that project actions contribute to long-term sustainability and the well-being of the affected communities. This comprehensive approach will enable us to make informed decisions in choosing the appropriate remediation, metal extraction methods, and technologies.
Pilot site 3.2: Greece
Location: Lavrion Ancient Silver Mines, Attica Region, Greece – ETAIREIA AXIOPOIISEOS KAI DIACHEIRISEOS TIS PERIOUSIAS TOU ETHNIKOUMETSOVIOU POLYTECHNEIOU (E.M.P.) (AMDC)
Involved partners: AMDC (lead), WRPC, MUO, INE
The underground hazardous waste repository (Figures 2.7, 2.8) (UHWR) examined was constructed in 2009, within the borders of Lavrion Technological & Cultural Park (LTCP) at the city of Lavrion, Greece. The main goal was to be used as a storage unit for hosting various waste resulting from the remediation activities of the former metallurgical plant that existed on site. In addition to the storage of the waste, the site can also be used for several research operations.
 Figure 2.7
Figure 2.7- Figure 2.8


The unique feature of the repository is that it has been constructed in low overburden especially for the purpose of waste storage and is also equipped with several technical barriers to safeguard the waste containment, unlike traditional deep repositories.
It was developed almost 40 m below ground level, following the principles of the room and pillar mining method. Thus, the rooms (corridors) with a width of 5.5 m and a height of approximately 6 m are developed, while the pillars of the host rock that remain in place are rectangular in shape, having a 7 m width. The total area of the repository is approximately 2200 m2, with an available free space of around 1800 m2.
Pilot Site 3.2 was selected for demonstration during the evolvement of the project and it is not described in the DoA or the GA. The Partners considered that it is an ideal site for implementing the Muon Technology (T3.1) targeting in the exploration stage.
Location: Pyhäsalmi Mine – North Ostrobothnia, Finland
Involved partners: UOULU
In this project, we will use two imaging techniques, electric resistivity imaging (ERI) and seismic imaging (SI), to study and understand the underground conditions of tailings embankments. We will focus on a specific area on the Western side of the tailings facility at Pyhäsalmi mine in Finland. By applying these technologies, we aim to create detailed maps and interpretations of the subsurface conditions in that area.
Location: Björkdal gold mine, Sweden
Involved partners:
Björkdal serves as the pilot site for several key project activities, starting with the evaluation of ENRX’s electrification demonstration to gain hands-on insight into emerging technologies while contributing valuable input on safety standards and functional requirements from an industrial standpoint.
The site will supply ore samples for X-ray classification and sorting by Fraunhofer in Germany, which is expected to deliver valuable insights due to the unique geological conditions of Björkdal’s gold-bearing quartz veins. Additionally, a field test of the autonomous system will be conducted using a battery-powered, articulated robot developed at LTU, with the aim of validating its performance in a real mining environment. Björkdal will also provide operational data to support the development of an advanced mine planning tool, contributing to enhanced safety, resource optimization, and more efficient material handling.
Location: Malaposta open pit site – Urgeiriça mine, Portugal
Involved partners: INE (lead), MUO, WRCP

This pilot project will focus on experimenting with the Muon telescope technology and its robotic deployment process in an open pit. The goal is to develop advanced autonomy features that can be integrated into a robot capable of exploring flooded mines. To validate these developments and take advantage of operational benefits, the initial field testing will be conducted at the Malaposta site. Once validated, the autonomy and robotic data integration into the Mine.io model will be further tested at the Urgeiriça mine in northern Portugal near Viseu. The main focus of this validation will be on assessing rock densities. To ensure the safety of personnel, underwater robotic assessment will be used to minimize risks. Additionally, efforts will be made to enhance the autonomy of the robotic system for operation in the challenging underwater mine environment